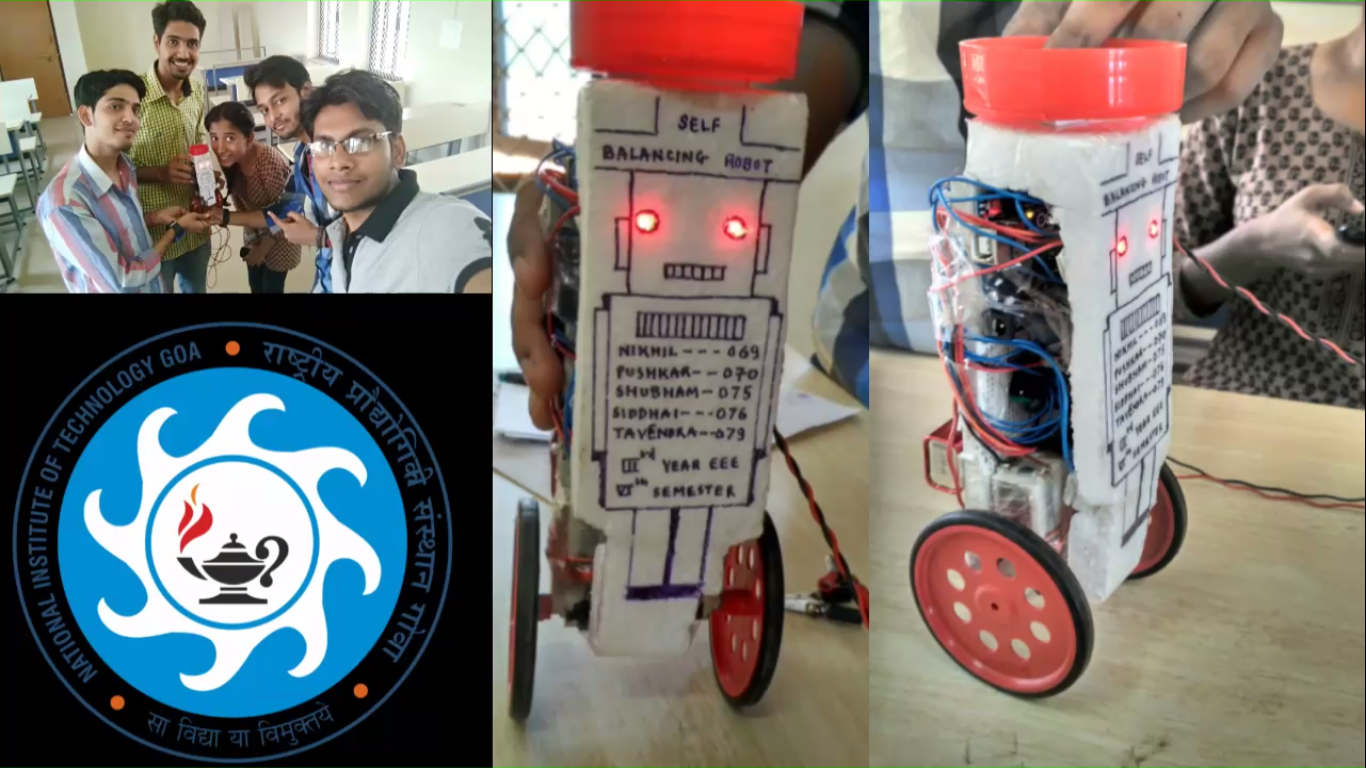
This is the control system project 'Self Balancing Robot'. This robot consists of Arduino, gyro module, gearbox motor & the motor driver mounted on it. On the lower part of the base platform, the two high torque motors 300 rpm are clamped with a gearbox so that it provides sufficient friction to balance the robot. The whole robot gets balanced on two wheels when we give disturbance or some load on the top. So if we give any disturbance to this robot it'll try to fall either in forward or backward direction but GYRO Module measures the angular displacement during the fall and gives a command to the motor driver which runs the motor and make it balance. This Robot work like an Inverted Pendulum and the Application of this Robot is Hoverboard Or Two Wheeler Self Balancing Scooter.
Demo
Comments
Post a Comment